 Abildung 1: Automatische Hüherklappe mit vertikale Führung |
 Abbildung 2: Hühnerstall mit horizontaler Hühnerklappe |
Am 1. Juli 2017 habe ich meinen 30ten Geburtstag gefeiert. Meine Freunde haben mich mit einem ganz besonderen Gemeinschaftsgeschenk überrascht: Einen Hühnerstall inklusive 5 Hühnern. Ich war wirklich überrascht und habe mich auch ziemlich gefreut, denn ich habe gegenüber meiner Lebensgefährtin schon öfters erwähnt gerne eine Hühnerproduktion für den Eigenverbrauch starten zu wollen. Immerhin haben wir einen großen Garten und können den Tieren auch genügend Auslauf bieten.
Mittlerweile hat sich die Rasselbande gut eingelebt und die Eierproduktion gestartet. Immens viel Arbeit verursachen die Tiere nicht – nur für Sauberkeit im Stall und genügend Nahrung ist zu Sorgen. Allerdings gibt es doch 2 Probleme bzw. Fragen die sich ergeben:
1) Wo hin mit den ganzen Eiern im 2-Personen Haushalt (4-5 Stück werden täglich produziert)?
2) Ausschlafen ist für mich passé und längere Ausgehzeiten müssen wohl überlegt sein. Der Grund ist, das die Hühner Abends (wenn es dunkel wird) eingesperrt werden müssen und Morgens (wenn es hell wird) freigelassen werden sollten. Ansonsten hätten Raubtieren wie zum Beispiel ein Marder oder Fuchs leichtes Spiel. Das Einsperren und Freilassen beschränkt sich dabei auf Stall-Tür auf- und zuzumachen. Den Stall suchen die Tiere selbst auf, wenn es dunkel wird.
Das bringt mich zum eigentlichem Thema: Der Hühnerstall bzw. die Stall-Türe muss automatisiert werden – sprich sie muss sich automatisch öffnen bzw. schließen und zwar in Abhängigkeit der Dunkel-/Helligkeit sowie der Uhrzeit. Grundsätzlich gibt es dafür bereits unzählige, mehr oder weniger Preiswerte, Lösungen am Markt. Allerdings haben alle diese Lösungen eines gemeinsam: Die „Hühnerklappe“ muss vertikal schließen bzw. öffnen (Abbildung #1). Sprich die Klappe wird durch einen „Flaschenzug“ zum öffnen nach oben gezogen. Mein Stall verfügt allerdings über eine Klappe die horizontal, also zu Seite, geschoben wird (Abbildung #2). -> Dafür habe ich noch keine fertige Lösung gefunden.
Daher habe ich beschlossen meine eigene Lösung unter dem Arbeitstitel „Chickensitter“ zu entwickeln. Außerdem kann ich so in Zukunft auch weitere Dinge im Hühnerstall regeln (zB Licht, Trinkwasserheizung, etc).
Meine Vorstellung bzw. mein Plan
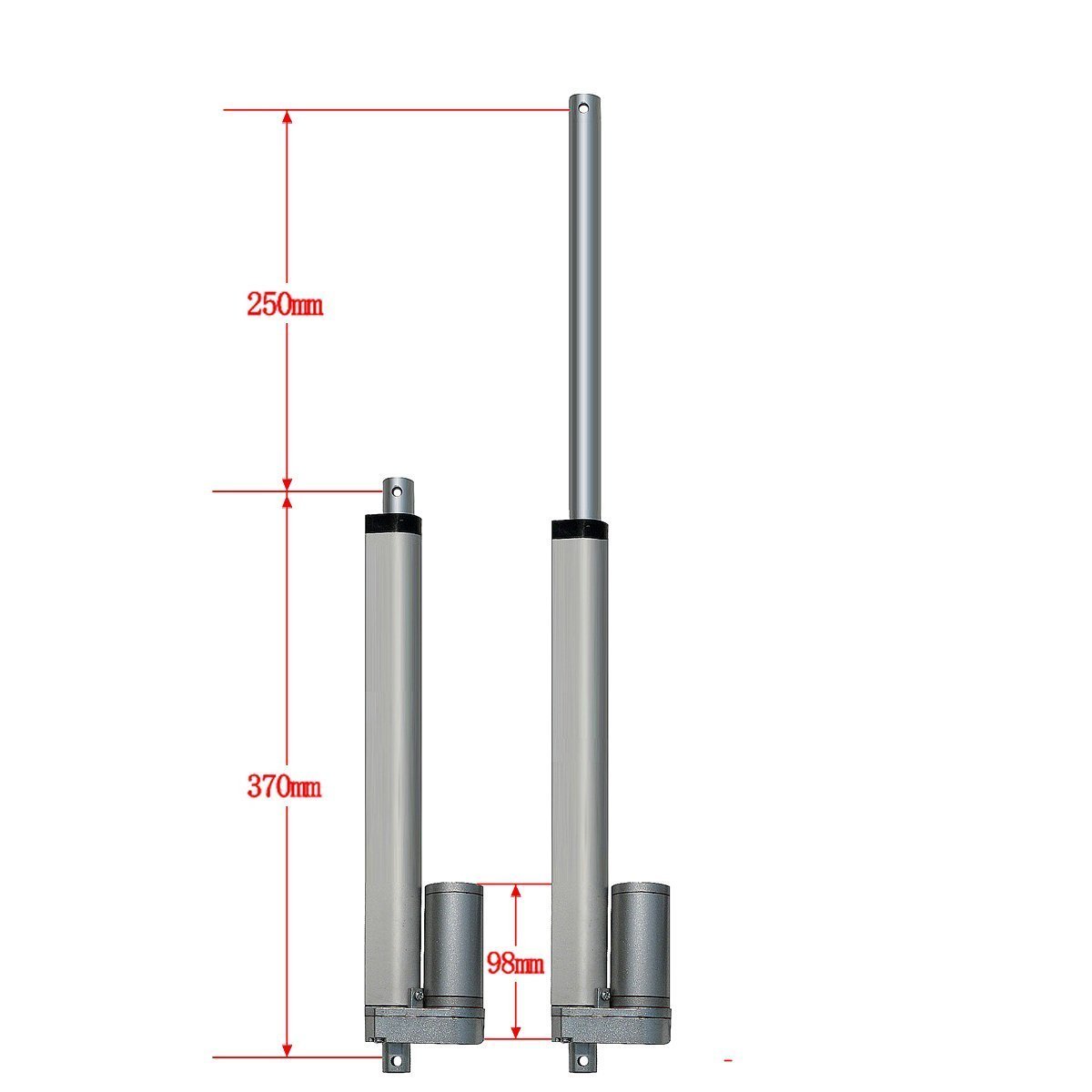 Abbildung 3: Linearaktor |
 Abbildung 4: Raspberry Pi Zero |
Ich möchte die Hühnerklappe des Stalles mit einem elektrisch angetriebenen Linearaktor öffnen und schließen. Im Prinzip funktioniert der Aktor ähnliche eines Hydraulik- oder Pneumatikzylinder, nur das dieser elektrisch angetrieben wird. Das ganze soll mit einem Raspberry Pi Zero gesteuert werden. Der Zero deswegen, weil die Apparatur später evtl. per Akku betrieben werden soll und der Raspberry Pi Zero den geringsten Stromverbrauch aller Pi’s hat.
Der, zugegeben etwas übertriebene, Aktor ist im Prinzip einfach zu steuern – Schließt man ihn an eine 12V Spannungsquelle an, so fährt er aus. Verpolt man ihn, also taucht Plus- und Minus-Pol, so fährt er wieder ein. Von Endanschlag zu Endanschlag benötigt der Antrieb etwa 50 Sekunden – eigentlich eine lange Zeit, aber so läuft zumindest kein Huhn in Gefahr eingeklemmt zu werden.
Natürlich sind die Ausgänge des Raspberry’s viel zu schwach, um den Aktor direkt steuern zu können.Daher muss eine Schaltung, als so zusagen „Übersetzer“ gebaut werden. Außerdem muss der PI auch mitbekommen wann die jeweiligen Endanschläge erreicht sind. Bestandteile der Schaltung sollen auch Schalter für den manuellen Betrieb sowie ein Helligkeitssensor für den automatischen Betrieb sein.
Hier mein erster Entwurf des Schaltplanes:
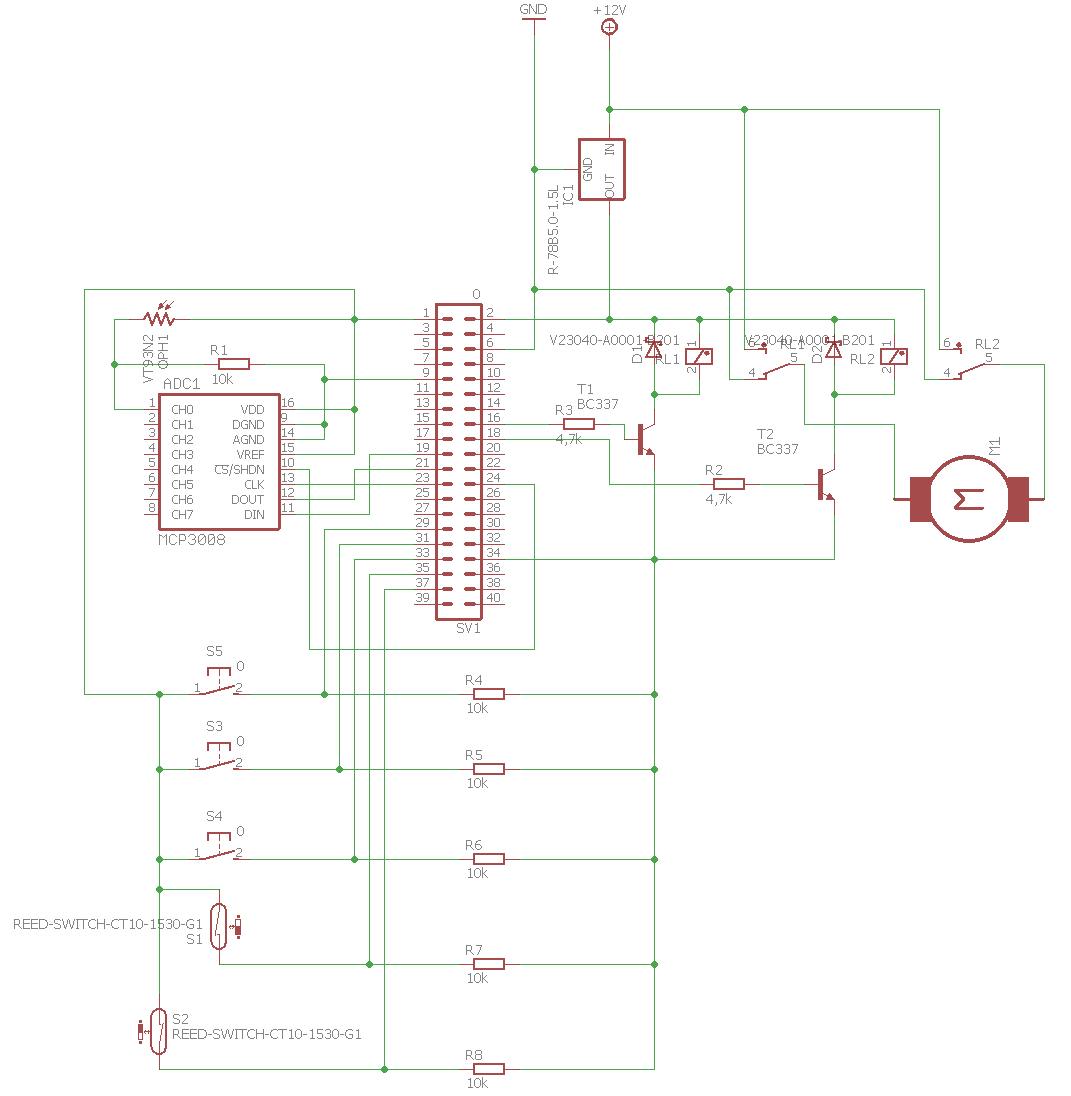
Abbildung 5: Erstwurf des Schaltplanes
Ganz oben ist die Spannungsversorgung mit Spannungswandler zu sehen. Der Wandler ist nötig, weil der PI nicht direkt an 12V (die der Linearaktor benötigt) betrieben werden kann, sondern mit 5V versorgt werden muss.
Links im Bild ist der Helligkeitssensor (Fotowiderstand) zu sehen. Da der PI keinen Analog-Digital-Wander besitzt, muss ein externer ADC verwendet werden.
Rechts im Schaltplan ist die Motorsteuerung aufgehoben. Der Motor wird über 2 Relais angesteuert. Im ruhenden Betrieb schalten liegt an beiden Polen des Motors Masse an. Abhängig davon, welches Relais man aktiviert, fährt der Aktor rein oder raus. Da der Pi selbst für die direkte Ansteuerung eines Relais zu schwach ist, werden die Relais wiederum über Transistoren geschaltet.
Unten im Plan sind die Taster für den manuellen Betrieb (vorgesehen sind: manuell auf/zu & stopp) sowie die Magnetkontakte (Reed-Kontakte) für die Endpositionsmeldung zu sehen.
Bauteilliste |
||
| Bauteil | Beschreibung | WWW-Link |
| R1,R4-R8 | Pull-Down Widerstand für Taster, Magnetkontakte und Lichtsensor (10kOhm) | Conrad |
| R2 & R3 | Basiswiderstände für die Relais-Steuer-Transistoren (4,7kOhm) | Conrad |
| RL1,RL2 | Relais für die Ansteuerung des Linearaktors | Conrad |
| D1,D2 | Freilaufdioden für die Relais – zum Ableiten von Überspannung (Schottky SB130) | Conrad |
| T1,T2 | Steuer-Transistoren für die Relais (NPN, BC337) | Conrad |
| S1,S2 | Magnetkontakte für Endpositionsmeldung | Conrad |
| S4-S5 | Taster für den manuellen Betrieb | Conrad |
| OPH1 | Fotowiderstand zur Helligkeitsmessung | Conrad |
| ADC1 | Analog-Digital Wandler zur Auswertung des Helligkeitssensors (MCP3008) | Conrad |
| SV1 | Schnittstelle zum Raspberry Pi | |
| IC1 | Spannungwandler (12V zu 5V) zur Versorgung des Raspberry PI und der Relais | Conrad |
| M1 | Linearaktor | Amazon |
Die nächsten Schritte
- Aufbau der einzelnen „Schaltungs-Sektionen“ auf einem Steckbrett um die gewünschte Funktion und korrekte Dimensionierung der Bauteile zu überprüfen.
- Entwurf des Platinen-Layouts (Lochraster) für die Steuerungsplatine
- Zusammenbau der Elektronik
- Programmierung des Steuerprogramms für den Raspberry Pi
- Testen aller Funktionalitäten
- Mechanische Montage
Zum Abschluss dieses Betrages – Hier noch Bilder von meinen neuen Mitbewohner:
 |
 |
 |
 |
Genau was ich gesucht habe (für unsere Meerschweinchen). Vielen Dank. Werde es bei Gelegenheit nachbauen.