Die ersten Bauteil – Tests auf dem Steckbrett sind abgeschlossen. Der Spannungswandler für die Energie-Versorung des PI’s arbeitet ausgezeichnet, auch die Relais und Transistoren sind richtig dimensioniert. Allerdings sind bei den ersten Experimenten auch eine Probleme bzw. Verbesserungsmöglichkeiten aufgetaucht:
1) Überarbeiten der Relais-Schaltung
Mein ursprünglicher Entwurf hat vorgesehen, den Linearaktor mittels 2 Relais mit Wechsel-Kontakt anzusteuern. Die Idee dabei war im Betrieb nur ein Relais „anzuziehen“ und trotzdem die Möglichkeit der Umpolung zu haben. Allerdings hat die Sache einen hacken: Im ausgeschalteten Zustand werden beide Kontakte des Aktors auf Masse gelegt – der Motor ist also kurz geschlossen. Das führt dazu, dass der Motor beim ausschalten stark abgebremst wird (was nicht gut für die Mechanik und für die Motorkohlen ist). Außerdem treten so Spannungsspitzen auf, die den Raspberry Pi hin und wieder abstürzen lassen.
Die Lösung: Die Relais-Schaltung wird umgebaut. Ich setze nun ein Relais mit 2 Wechsler ein (für die Umpolung) und eines der bestehenden Relais für das Ein- und Ausschalten der Spannungsversorgung. Das Relais mit dem Doppel-Wechler ist Bi-Stabil mit 2 Spulen. Sprich es muss nur jeweils einmal kurz mit Spannung versorgt werden um die Kontakte umzuschalten, danach hält es die Position ohne Spannungsversorgung. Nachteil: Da das Relais 2 Spulen zur Steuerung besitzt, wird ein weiter Ausgang des Raspberry’s belegt – auch eine weiter Transistor-Stufe ist notwendig.
2) Uhr
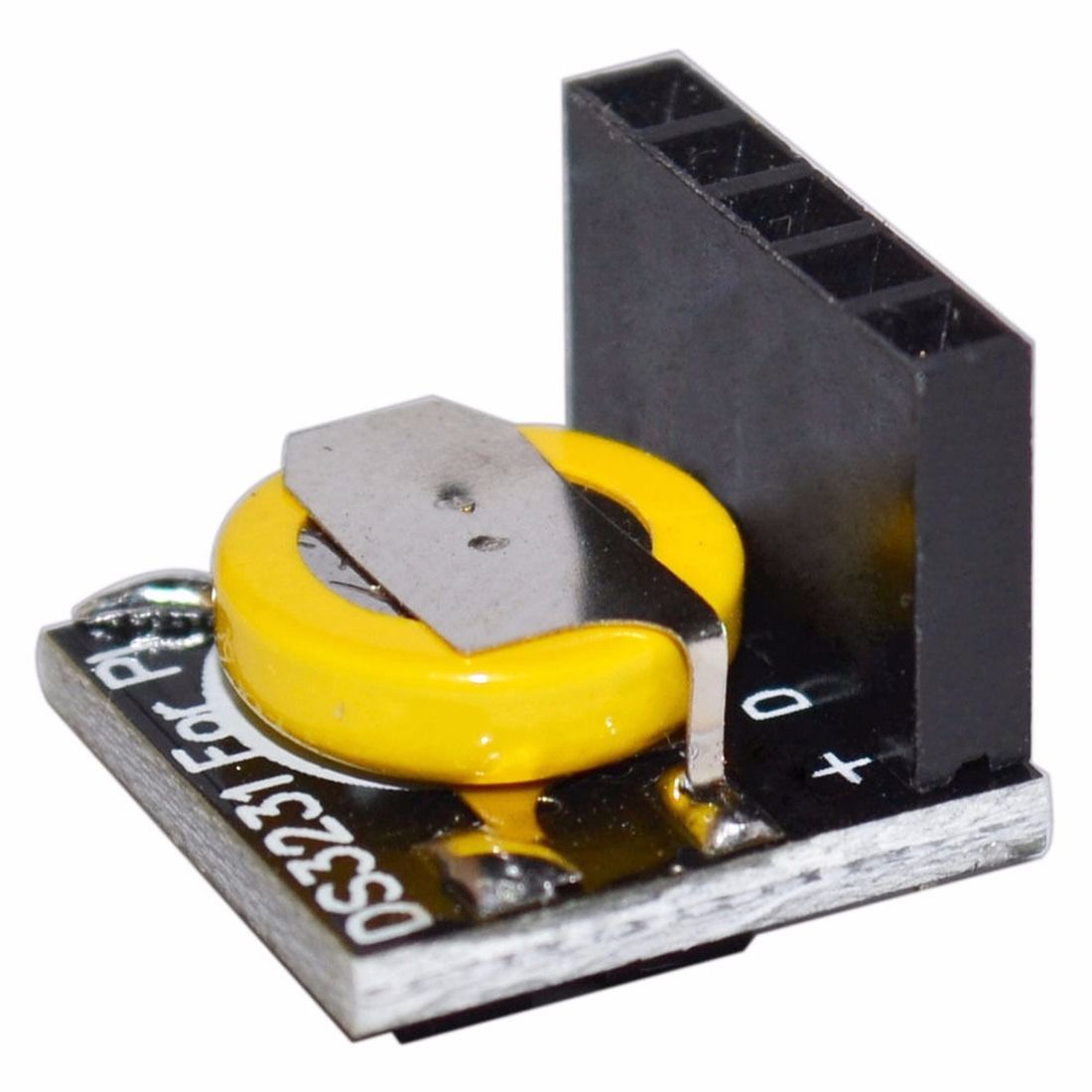 Die Steuerung soll auch die Uhrzeit berücksichtigen. Allerdings ist mir klar geworden, dass der Pi über keine Hardware-Uhr verfügt. Das bedeutet, das die Uhrzeit nach jedem Start neu eingestellt werden muss (es sei den es ist WLAN in der Nähe). Als Lösung habe ich ein fertiges RTC-Modul (RealTimeClock) bestellt. Das Modul soll quasi der Zeitgeber für den Pi sein, es verfügt über eine eigene Pufferbatterie um die Uhrzeit auch ohne Stromversorgung halten zu können. Das Modul wird mittels I2C-Schnittstelle an den Raspberry Pi angeschlossen. Dieses Modul wird zum Einsatz kommen: https://www.ebay.com/itm/381765727284?rmvSB=true
Die Steuerung soll auch die Uhrzeit berücksichtigen. Allerdings ist mir klar geworden, dass der Pi über keine Hardware-Uhr verfügt. Das bedeutet, das die Uhrzeit nach jedem Start neu eingestellt werden muss (es sei den es ist WLAN in der Nähe). Als Lösung habe ich ein fertiges RTC-Modul (RealTimeClock) bestellt. Das Modul soll quasi der Zeitgeber für den Pi sein, es verfügt über eine eigene Pufferbatterie um die Uhrzeit auch ohne Stromversorgung halten zu können. Das Modul wird mittels I2C-Schnittstelle an den Raspberry Pi angeschlossen. Dieses Modul wird zum Einsatz kommen: https://www.ebay.com/itm/381765727284?rmvSB=true
3) empfindliche Interrupts
Einen manuellen Tastendruck möchte ich am Raspberry Pi gerne über Interrupts abfragen – das spart CPU-Zeit, da kann ständiges Abfragen der Schalter in einer Dauerschleife notwendig ist. Allerdings scheint der kleine Pi so empfindlich zu sein, das er auf die kleinsten Spannungsänderungen reagiert und einen Interrupt auslöst – auch wenn gar kein Taster gedrückt wurde. In meinem Fall hagelte es in meinem Testprogramm andauernd Interrupts, sobald die Linearaktor am laufen ist. Als Umgehung frage ich im Testprogramm beim abhandeln der Interupt-Anforderung den tatsächlichen Status den GPIO-Einganges ab -> das hilft.
Der aktuelle Stand & die nächsten Schritte
Momentan habe ich die Spannungsversorgung, die Relais-Schaltung sowie 3-Taster zur manuellen Steuerung auf einen Steckbrett aufgebaut. Ein Python-Progamm auf dem Pi ermöglicht es, den Linearaktor auf Tastendruck aus- und einzufahren sowie die Bewegung zu stoppen.
Hier ein aktuelles Bild des Aufbaues: 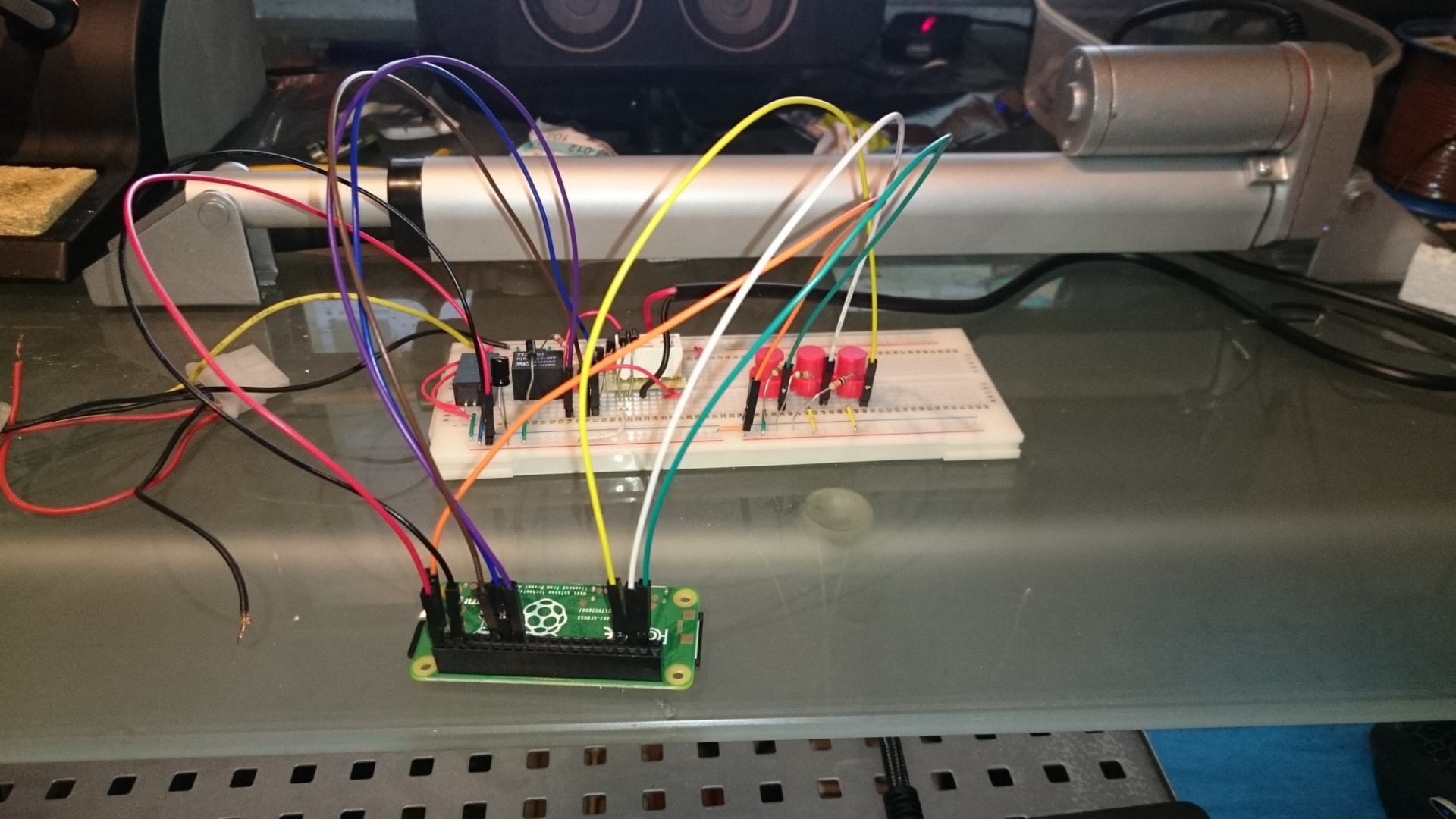
Als nächsten Schritt möchte ich die Programm- bzw. Uhrzeitgesteuerte Bewegung des Linearantriebes testen. Danach werden die Magnet-Kontakte (sollen als End-Positions-Geber dienen) getestet. Ist das abgeschlossen werde ich mich mit dem Analog-Digital-Konvertert und dem Auslesen des Lichtwiderstandes widmen …